
Joint Manipulator
- Home
- Products
- Robotics
- Joint Manipulator

Joint Manipulator
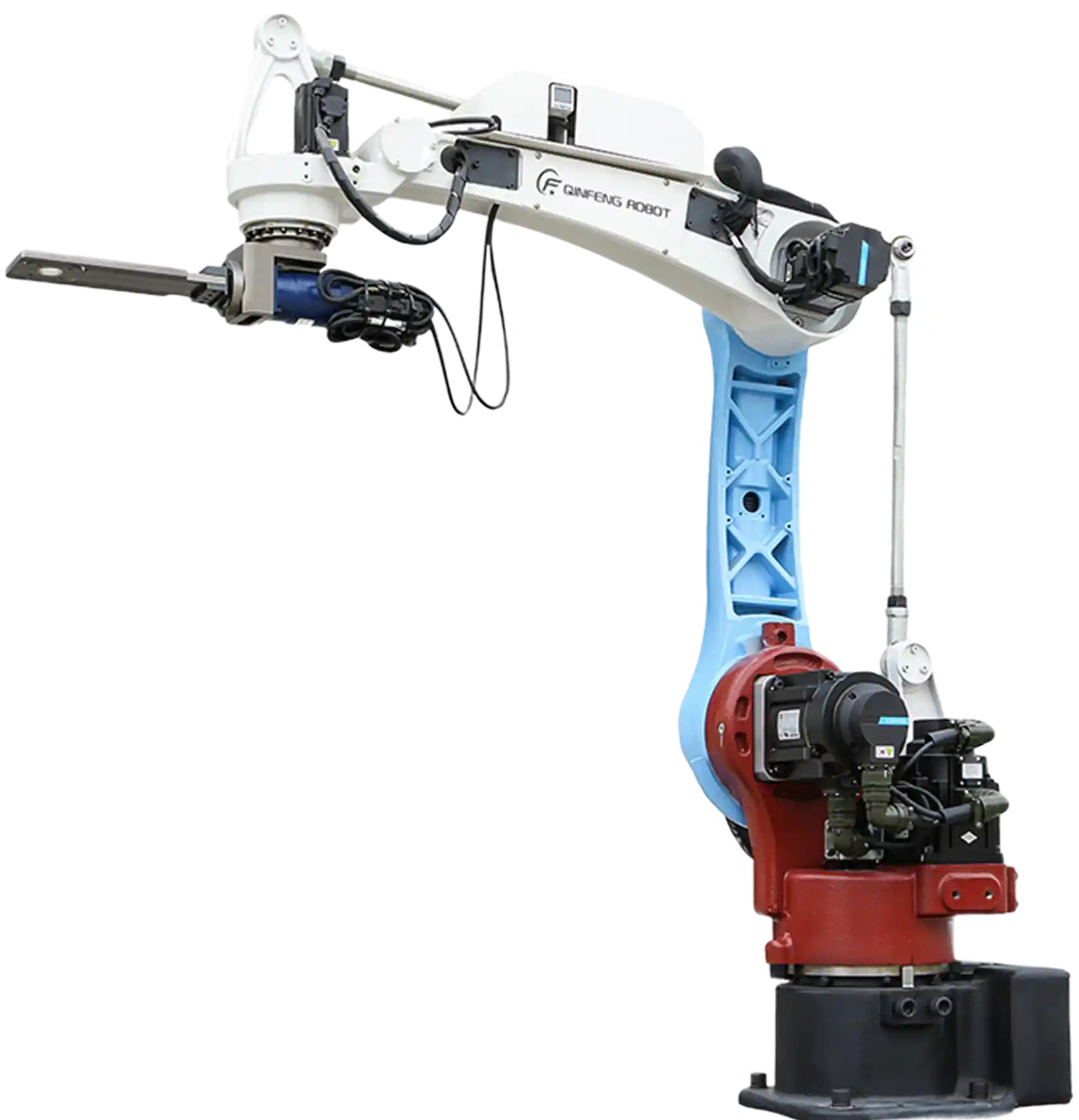
A joint manipulator is a type of industrial robot arm that consists of multiple rotating joints (like human arm joints: shoulder, elbow, wrist). Each joint allows the arm to move in different directions, giving it flexibility to reach various positions and angles.
- Reach: 1.2 m – 1.8 m
- Axes: 4 or 5
- Payload: Up to 10 kg
- Repeatability: ±0.1 mm
- Working Radius: 250mm to 1200 mm
- Power Supply: 220V or 380V AC
- Operating Temperature: -20°C to 45°C
- Multiple Degrees of Freedom
- Modular Design
- Advanced Control Systems
- Enhanced Precision
- Improved Productivity
- Adaptability
- 1.8M four-joint five-axis manipulator
- 1.4M four-joint five-axis manipulator
- 1.4M four-joint four-axis manipulator
- 1.2M four-joint four-axis manipulator
- Stamping operations
- Assembly lines
- Machine tending
- Welding